As applications of robotics continue to diversify, flexibility has emerged as one of the most desirable characteristics. Recent research in the lab of Ramsharan Rangarajan in the Department of Mechanical Engineering examines how to incorporate this literally: by building a flexible, bendy robot.
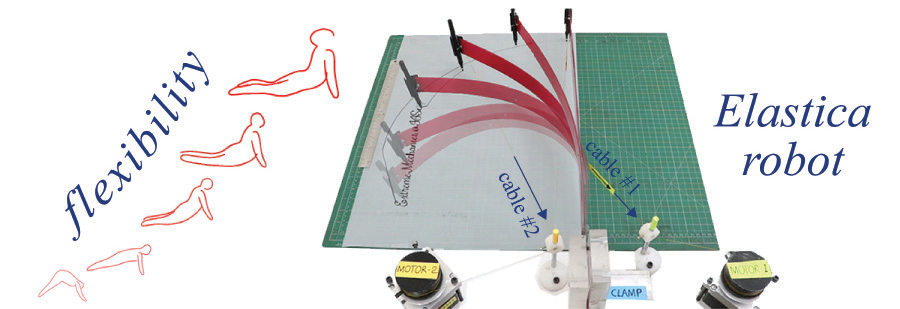
Using nonlinear mechanics and optimisation-based algorithms, they have developed a flexible, tendon-actuated arm that functions as a dextrous robot. The ‘Elastica Robot’ – named after the mechanical theory attributed to Euler – not only embraces flexibility but also relies on it as for functioning.
The researchers believe that such a flexible, remotely-operated and energy-efficient robot can have diverse applications. The fact that its functioning is independent of the length scale or the material means that it can, in principle, be miniaturised to design medical devices or enlarged for deployment in space-related applications.





